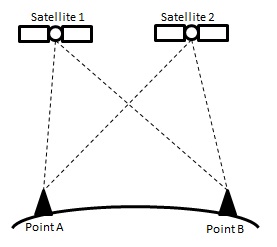
Generally used in Relative GPS, it is the difference of phase measurement on two points from two satellites; it is used to mminimize clock, orbital, localized atmospheric, and reciever clock errors.
Generally used in Relative GPS, it is the difference of phase measurement on two points from two satellites; it is used to mminimize clock, orbital, localized atmospheric, and reciever clock errors.