

Research Area
Home
- Research Area
- 3D Mapping Aided GNSS Positioning
- Perceived Aided Sensors Integrated Navigation (PASIN) Scheme
- Realization of Low-Speed Autonomous Ground Vehicle
- GNSS Vector tracking in urban canyons
- Multi-sensors integrated navigation system for autonomous driving
- Collaborative Positioning for IoT in Smart Cities
- Positioning Integrity Monitoring for autonomous driving vehicle
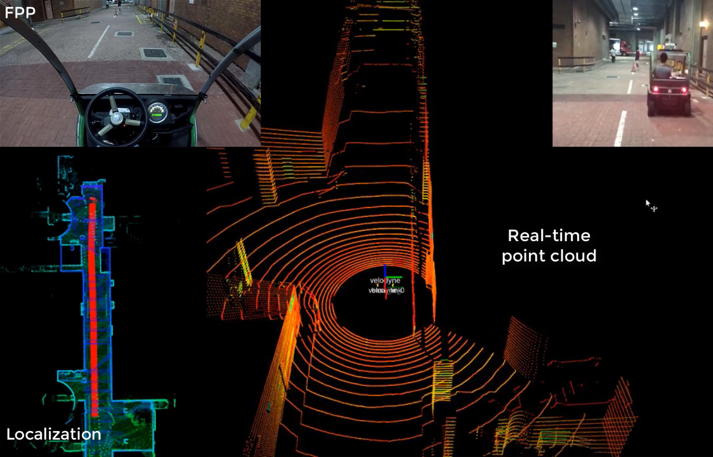
Realization of Low-Speed Autonomous Ground Vehicle
IPNL implements the autoware package to realize a low-speed AGV. The localization, guidance, and control functions are self-developed. This research aims to gain an understanding of the whole AGV system for IPNL members. The wire-controllable vehicle is donated by iDriverpuls which is a successful startup company.
Researcher : Dr Weisong WEN (Research Assistant Professor);
Mr Yin-Chiu KAN (Technical officer in PolyU AAE);
Mr Sai Hu (Alumni); Mr Weichang XU (MSc Student)
Related Publication:
PERFORMANCE ANALYSIS OF NDT-BASED GRAPH SLAM FOR AUTONOMOUS VEHICLE IN DIVERSE TYPICAL DRIVING SCENARIOS OF HONG KONG
Weisong Wen, Li-Ta Hsu, Guohao Zhang
Sensors 18:3928.
BACK TO TOP