

Research Area
Home
- Research Area
- 3D Mapping Aided GNSS Positioning
- Perceived Aided Sensors Integrated Navigation (PASIN) Scheme
- Realization of Low-Speed Autonomous Ground Vehicle
- GNSS Vector tracking in urban canyons
- Multi-sensors integrated navigation system for autonomous driving
- Collaborative Positioning for IoT in Smart Cities
- Positioning Integrity Monitoring for autonomous driving vehicle
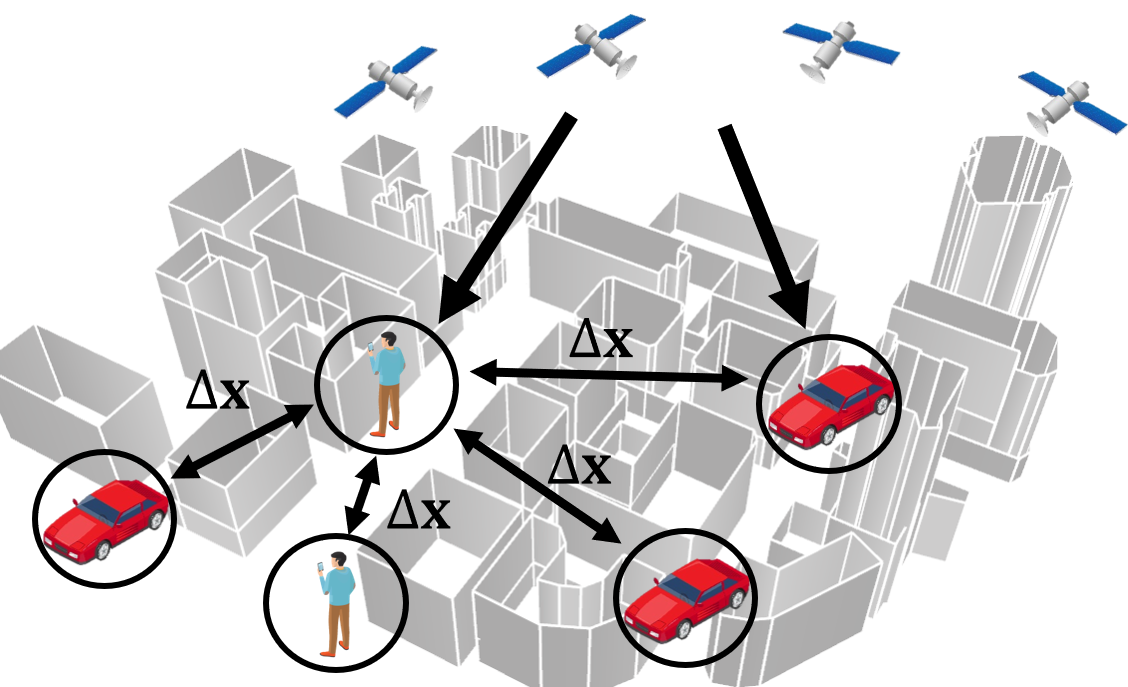
Collaborative Positioning for IoT in Smart Cities
Due to the forecasting 5G connectivity, all the road agents are expected to connect together. One potential is to making use of the sensors' measurement from the connected road agents to collaboratively positioning. We IPNL aim to develop a collaborative positioning platform and algorithm to integrate the information. We expect the collaborative positioning will play an important role in the futuristic IoT applications.
Researcher :
Dr Guohao Zhang (Research Assistant Professor);Mr Yang SONG (MSc Student)
Related Publication:
RECTIFICATION OF GNSS-BASED COLLABORATIVE POSITIONING USING 3D BUILDING MODELS IN URBAN AREAS
Guohao Zhang, Weisong Wen, Li-Ta Hsu
GPS Solutions, 2019, 23(3): 83
A NEW PATH PLANNING ALGORITHM USING A GNSS LOCALIZATION ERROR MAP FOR UAVS IN AN URBAN AREA
Guohao Zhang, Li-Ta Hsu
Journal of Intelligent & Robotic Systems, 2019, 94(1): 219-235.
BACK TO TOP